Laboratorio di design del prodotto 2 A
Corso di laurea triennale in Design
Docente
Marco Ferreri
Collaboratore
Pietro Garofalo
Agricoltura Automatica
L’agricoltura intensiva dei giorni nostri sta lentamente distruggendo e impoverendo il nostro territorio, un tempo vivo e fertile, in favore di una logorante produzione di massa.
Per questo motivo si sta cercando di tornare sempre più ad una agricoltura consapevole e vicina al suolo, nella piena facoltà della sua importanza e del suo rispetto, cercando per quanto possibile di non abbandonare quegli strumenti che sono riusciti nel tempo a migliorare le condizioni di lavoro e il benessere dei lavoratori del settore.
L’obiettivo progettuale di questo laboratorio è stato quello di conciliare il lavoro dell’uomo e quello delle macchine intelligenti e dei robot più evoluti in una collaborazione il più possibile meno invasiva nelle pratiche agricole odierne, tenendo sempre in considerazione la pratica di una agricoltura di tipo sinergico come soluzione per preservare la salute umana e dell’intero ecosistema.
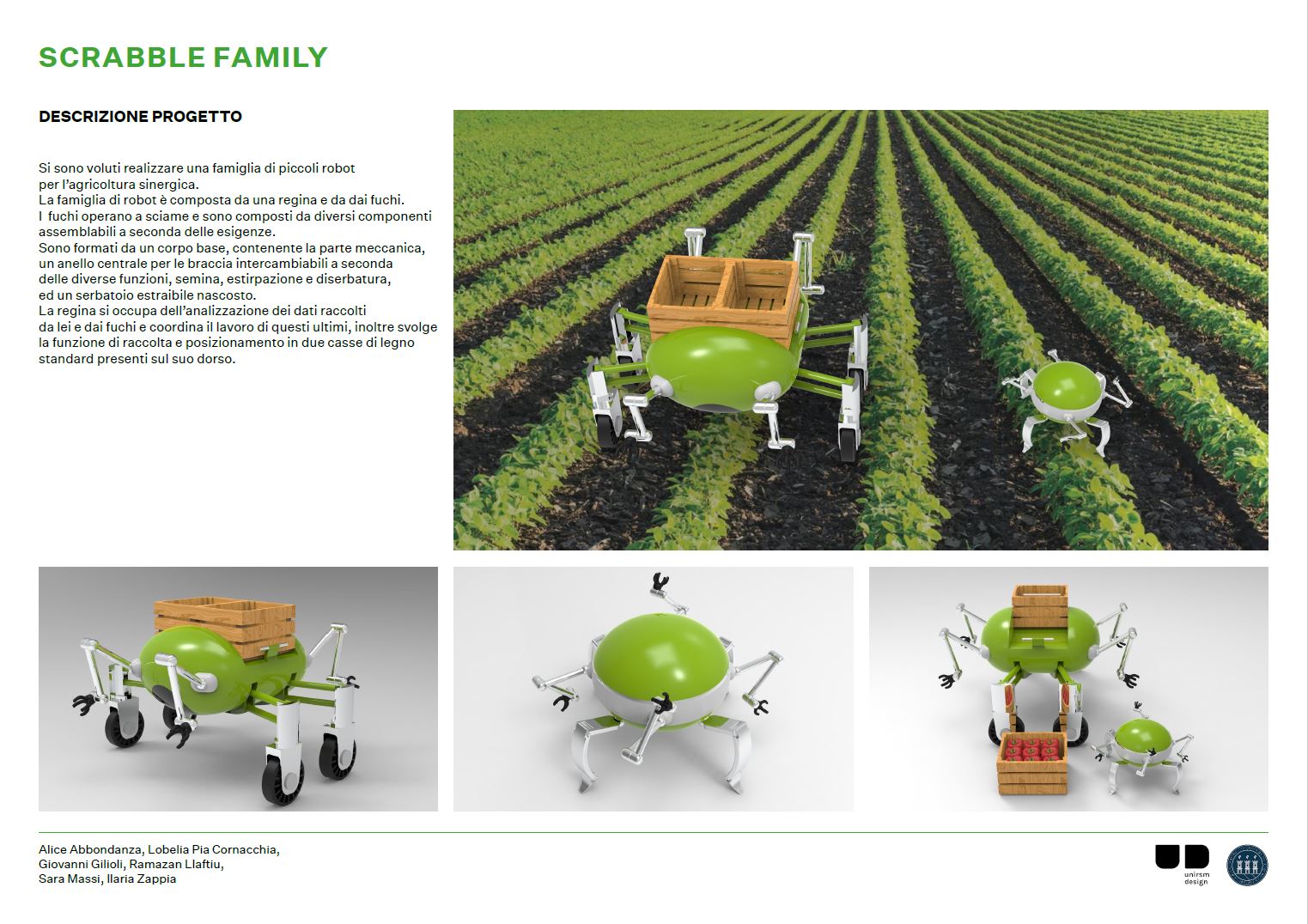
Scrabble family
La Scrabble Family è composta da una serie di robot in grado di svolgere in modo efficiente ed efficace tutte le fasi della produzione agricola, dalla semina, al diserbo, all’estirpazione, alla raccolta di ortaggi e all’analisi di dati.
Tutto il processo è tracciato permettendo di ottenere dati utili all’ottimizzazione dei processi. Partendo dall’idea di sciame è stato ideato un robot “regina” che coordina in modo intelligente le operazioni dei robot “fuchi”.
Studenti: Alice Abbondanza; Sara Massi; Lobelia Cornacchia; Giovanni Gilioli; Ilaria Zappia; Ramazan Llaftiu



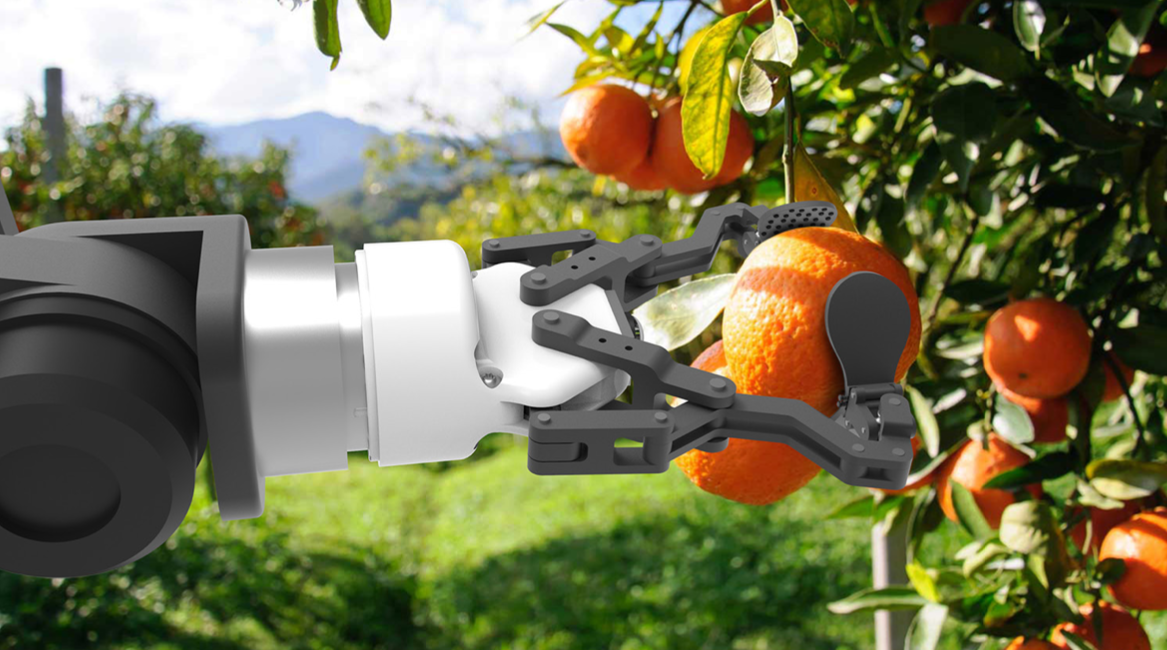
COLLECTO-BOT
‘Collecto-Bot’ è un sistema di robot agricoli pensati per ottimizzare la raccolta dagli alberi da frutto. Gli aspetti più critici di questa tipologia di raccolta sono la variazione di pendenza del terreno e di altezza degli alberi. Serve perciò una macchina versatile in ogni condizione e ambiente in cui si trovi, partendo dallo studio dei singoli componenti, passando dalla loro relazione reciproca per far sì che essi potessero lavorare in maniera ottimale senza intralciarsi.
Studenti: Edoardo Bellini; Pietro Mancini; Sarah Mazza; Elena Francioni; Aurora Bianchini






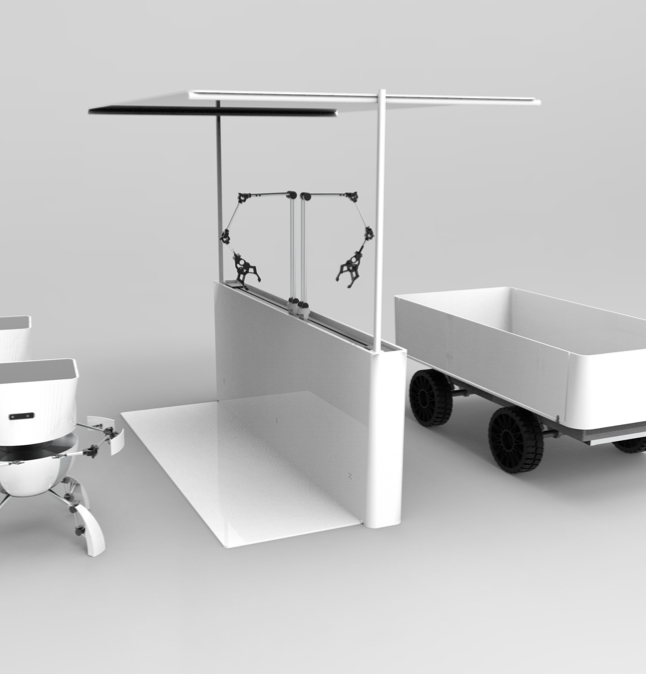
Sir
SIR è un progetto che contiene non solo un robot ma un sistema completo di gestione dello spazio agricolo.
Un robot, ricaricabile attraverso energia solare, multifunzionale in quanto semina e raccoglie e intelligente, perché è in grado di capire quando un ortaggio o un frutto sono maturi e pronti per la raccolta.
I prodotti devono subire il minor numero di manipolazioni possibile, perciò è stato pensato un sistema che facesse in modo di avere delle cassette già pronte per il mercato. Ogni singolo robot è in grado di trasportare una cassetta e, nel momento in cui questa è piena, potrà scaricarla ad una stazione di servizio, che attraverso i suoi bracci meccanici scaricherà il robot e lo rifornirà di una cassetta vuota nuovamente da riempire. Le cassette scaricate saranno direttamente messe in un cassone mobile, che una volta raggiunto il carico massimo, percorrerà il tragitto fino al punto di raccolta e smistamento principale.
Studenti: Federica Romualdi; Valentina Montanari; Samuele Sapori; Samuele Tursi; Giovanni Locatelli




Iseva
Iseva è una macchina agricola robotizzata ed automatizzata, capace di riportare su larga scala l’ideale di agricoltura sinergica. La struttura è dotata di strumenti di semina e di raccolta adattabili a diversi tipi di coltivazione. Un carrello di supporto ha il compito di trasportare cassette piene e vuote dalla macchina al centro di raccolta. Rispecchia gli ideali ecosostenibili, è versatile, intelligente ed è un grande aiuto per il lavoro nelle grandi coltivazioni.
Studenti: Davide Pierini; Sara Franchini; Francesco Cardinali; Carlo Alberto Tacchi; Agata Mazza


Seemi
Seemi si ispira alla struttura degli spazi dell’agricoltura sinergica, ai suoi principi e al legame con la terra, cercando di rapportarli in un contesto moderno e tecnologico.
Il movimento della macchina avviene in modo da non intaccare gli spazi coltivati, grazie anche alla capacità di adattamento al terreno, caratterizzato solitamente da cunette e avallamenti, e al tipo di coltivazione, dai bulbi ai piccoli alberi da frutto che si sviluppano in altezza.
Il sistema si compone sostanzialmente di due macchine simili, gestibili da remoto e dotate di intelligenza artificiale. La prima svolge le funzioni di semina e di monitoraggio attraverso un sistema di bracci robotizzati, strumenti e sensori. La seconda si occupa invece dell’intera gestione del raccolto.
Studenti: Federico Ceccarelli; Giada Tartagni; Arturo Mazzanti; Marcello Garramone; Maria Chiara Ponzio


Level Up
Level Up nasce dalla necessità di trasferire un metodo agricolo sostenibile dalla piccola scala alla grande produzione agricola contemporanea, rendendola realmente competitiva rispetto ai metodi agricoli tradizionali e ormai obsoleti.
La macchina si muove attraverso un sistema a doppia ruota che permette uno spostamento multidirezionale lungo di campi coltivati di larghezza fino a venti metri e che si possono sviluppare su una qualsiasi lunghezza.
Il sistema è in grado di seguire in autonomia tutto il processo di crescita delle piante, dalla semina alla raccolta. L’intervento dell’uomo è richiesto nel montaggio dei seminatori, modulari e ricaricabili che permettono di avere pieno controllo sul tipo di coltivazione e sugli abbinamenti. La raccolta, invece, avviene attraverso bracci robotizzati che si spostano lungo binari situati sotto la scocca superiore della macchina, in grado di raccogliere frutti e ortaggi di diverse dimensioni, di reciderli dalle piante o dai rami, e anche di collaborare per sollevarne di più grandi. Il raccolto viene depositato in comuni cassette per ortofrutta, poste sopra la scocca della macchina. A questo punto una macchina ausiliaria le preleva e le stocca in un magazzino.
Studenti: Valeria Guidetti; Riccardo Bagnolini; Alessia Spacagna; Giacomo Giovagnoli; Alessia Bastoni


Ultrabot
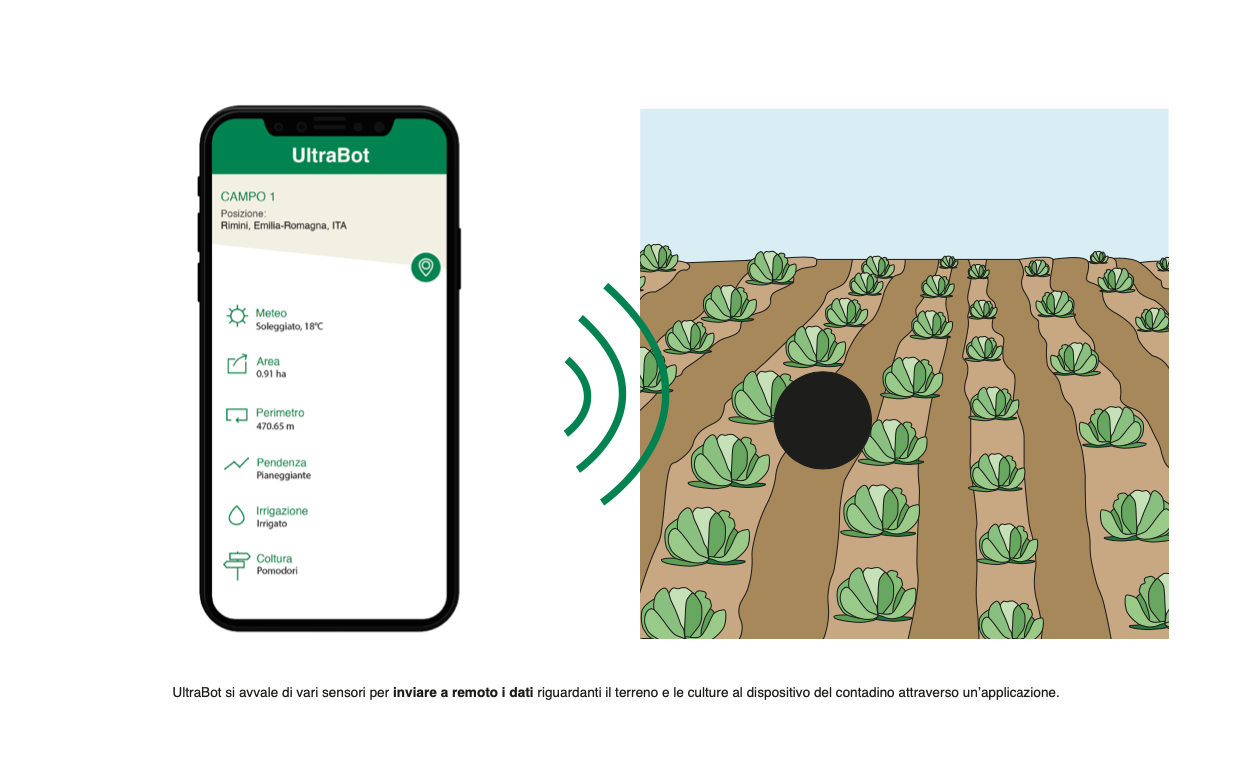
Il sistema di UltraBot è equipaggiato di un sensore Gps di bordo, sensori di prossimità e sensori in grado di raccogliere dati riguardo il suolo e la coltivazione. Il tutto è collegato ad un’applicazione che permette il funzionamento da remoto.
UltraBot è un robot in grado, quindi, di monitorare la qualità e lo stato di salute delle colture e di rilevare la presenza indesiderata di animali, evitando che possano rovinare il raccolto allontanandoli con ultrasuoni.
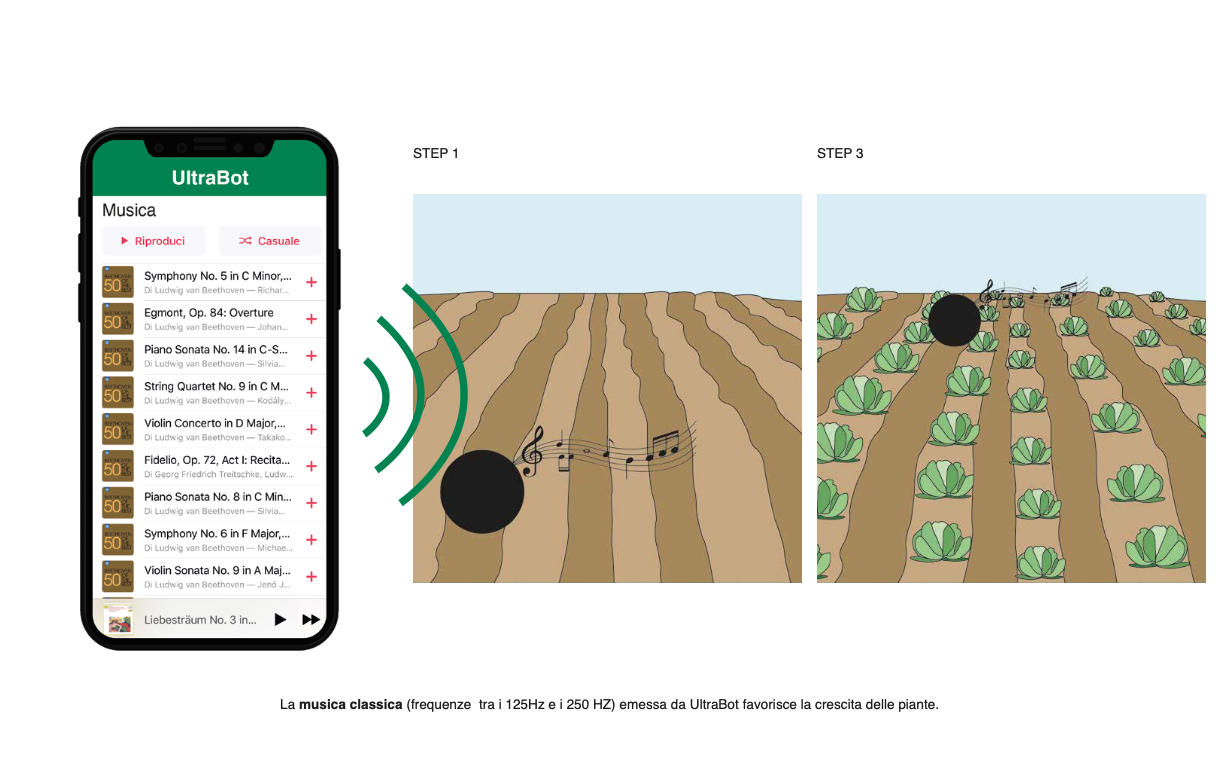
Inoltre, grazie alla presenza all’estremità di casse acustiche, UltraBot è in grado di riprodurre suoni e musica che favoriscono la crescita delle piante, come le frequenze tra i 125Hz e i 250 Hz, quelle della musica classica.
La forma sferica rende lo spostamento facile e veloce su ogni tipo di terreno. Il movimento è prodotto da un pendolo motorizzato che spinge il corpo cambiando il suo centro di gravità, consentendo un moto bidirezionale ed effettuando virate a 360 gradi.
Studenti: Susy Cecchi; Bianca Bertuccioli; Denis Domenichetti; Serena Santolini; Alessia Baldacci